Happy New Year!
I created a video series that describes how process hydraulic behaviour can cause perfectly good PID controllers to become unreliable. Facilities can increase capacity by addressing these issues, often with no additional capital.
Part 1: Control Problems
The symptoms of a control problem are described.
Part 2: Tuning Strategies
Two different tuning strategies and objectives are described. The objective of Ziegler-Nichols is to address the disturbance as quickly as possible, while Lambda addresses the disturbance in a specified length of time.
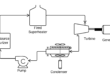
Part 3: Process Gain and Temperature Control
Process gain is derived for heat exchanger temperature control: the process gain changes with heat medium flow rate. A change in process gain leads to poor performance of a PID controller: this is demonstrated with a simulation example.
Part 4:Level Control
Vessels are always designed to provide holdup for normal operation. Ziegler-Nichols tuning does not consider the available holdup time, where Lambda tuning does. The effect of these two tuning strategies on the manipulated flow rate (a disturbance to the next process) is demonstrated with a simulation example.
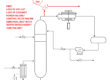
Part 5: Pressure Control
Pressure can behave as self-regulating or non-self-regulating. Interactions with the associated flow controllers will determine if the entire system is robust or not.
Cascade control uses two controllers to manage one process. The behavior of control valve hydraulics is crucial to the success of the entire loop. Direct control may be more robust than cascade.